Organizers
Sean Fanello, Julien Valentin, Jonathan Taylor, Christoph Rhemann, Adarsh Kowdle, Jürgen Sturm,
Christine Kaeser-Chen, Pavel Pidlypenskyi, Rohit Pandey, Andrea Tagliasacchi, Sameh Khamis,
David Kim, Mingsong Dou, Kaiwen Guo, Danhang Tang, Shahram Izadi
Augmented Perception - Google
ECCV 2018 Tutorial
The website for the ECCV 2018 tutorial is: http://augmentedperception.github.io/eccv18/
Description
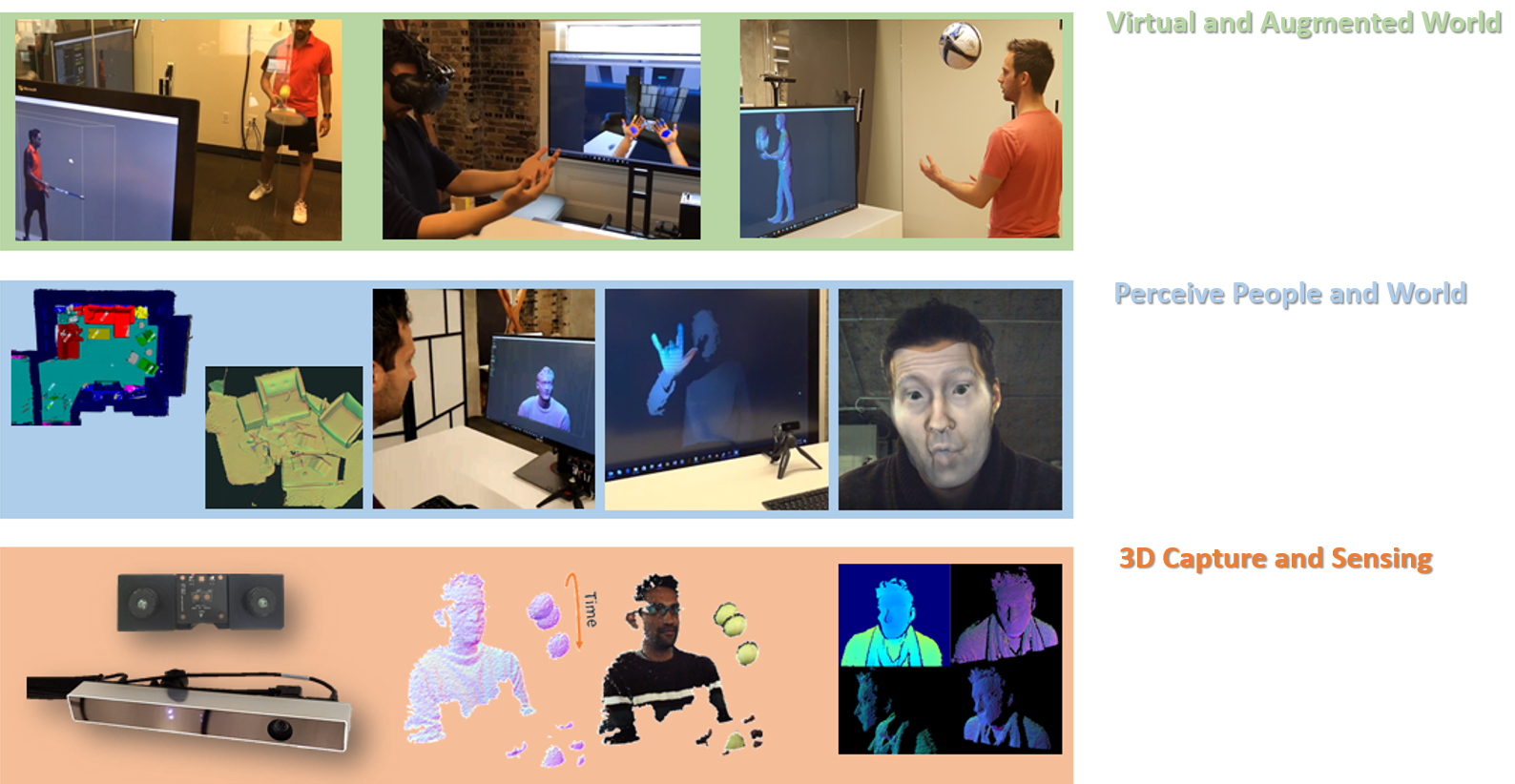
The emergence of virtual and augmented reality has increased the demand of robust systems for 3D capture, reconstruction and understanding. Designing such systems involves developing high quality sensors and efficient algorithms that can leverage new and existing technologies. To this end, we design depth sensors with two properties that drastically simplify the problem of fusing incomplete sensor data. First, an UltraFast depth stream that significantly reduces the frame to frame motion. Second, by allowing multiple sensors to be easily combined (without interference) we can eliminate occlusions. As a result, we have developed a wide range of efficient algorithms for reconstruction, tracking and understanding that are designed to work with this technology. In this tutorial we will walk the audience through the ins and outs of building such a stack from the ground up. From building such a sensor to applications for mixed reality with particular emphasis on high speed 3D capture systems.
When and Where
Friday June 22nd 2018
Ballroom A - Calvin L. Rampton Salt Palace Convention Center, Salt Lake City
Program
Time |
Title |
Speaker |
|---|---|---|
9:00 - 9:10 |
Introduction |
Shahram Izadi AP - Google |
Session 1: Depth Sensors & 3D Capture |
||
9:10 - 9:40 |
Depth Sensors and Algorithms: What, When, Where |
Adarsh Kowdle AP - Google |
9:40 - 10:10 |
Triangulation Methods: From Theory to Mobile |
Christoph Rhemann AP - Google |
10:10 - 10:30 |
UltraFast Machine Learning for Triangulation Methods |
Sean Fanello AP - Google |
10:30 - 11:00 |
Coffee Break |
|
11:00 - 11:15 |
StereoNet: Guided Hierarchical Refinement for Real-Time Edge-Aware Depth Prediction |
Sameh Khamis AP - Google |
11:15 - 11:30 |
Active Stereo Net: Self-Supervised End-to-End Training for Active Stereo Systems |
Yinda Zhang Princeton University / AP - Google |
Session 2: Tracking & Relocalization |
||
11:30 - 12:00 |
Non-Linear Optimization Methods |
Jonathan Taylor AP - Google |
12:00 - 13:00 |
Lunch Break |
|
13:00 - 13:45 |
Localization and Mapping - ARCore |
Konstantine Tsotsos ARCore - Google |
13:45 - 14:00 |
Machine Learning for Camera Relocalization |
Julien Valentin AP - Google |
Session 3: World Understanding |
||
14:00 - 14:15 |
3D Scene Understanding |
Juergen Sturm AP - Google |
14:15 - 14:30 |
Semantic Labeling |
Thomas Funkhouser Princeton University / AP - Google |
Session 4: Non Rigid Tracking & Reconstruction |
||
14:30 - 15:00 |
Parametric Tracking |
Anastasia Tkach Sofien Bouaziz AP - Google |
15:00 - 15:30 |
Non Rigid Reconstruction of Humans |
Mingsong Dou Kaiwen Guo AP - Google |
15:30 - 16:00 |
Coffee Break |
|
Session 5: Machine Learning and Interactive Applications |
||
16:00 - 16:15 |
LookinGood - Enhancing Performance Capture with Real-time Neural Re-rendering |
Rohit Pandey AP - Google |
16:15 - 16:30 |
Fast Machine Learning on Embedded Devices |
Christine Kaeser-Chen Mobile Vision - Google |
16:30 - 16:45 |
Digital AR |
David Kim AP - Google |
Please contact Shahram Izadi or Sean Fanello if you have any questions or to request the slides.